

 QQ
QQ
涂装机器人的分类和特点——川崎涂装机器人
声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
涂装机器人与传统的机械喷涂相比主要下优点:
提高涂料的利用率、降低有害挥发性有机物排放;
提高喷枪的运动速度,缩短生产节拍;
喷涂机器人**地按照轨迹进行喷涂 ,无偏移并完美地控制喷枪的启动;
柔性强,灵活性高,喷涂机器人可以喷涂具有复杂几何结构或不同大小和颜色的产品;
与高速旋杯经典涂装站相比 ,可以减少喷枪数量,降低系统故障率和维护成本;
目前,涂装机器人从结构上大多数采用和工业机器人相似的5或6自由度串联关节式机器人,在其末端加装自动喷枪。
按照手腕按照手腕结构划分,涂装机器人应用中较为普遍的主要有两种:
球型手腕涂装机器人和非球型手腕涂装机器人
按照手腕按照手腕结构划分,涂装机器人应用中较为普遍的主要有两种:
球型手腕涂装机器人和非球型手腕涂装机器人

1.球型手腕涂装机器人:
球型手腕涂装机器人的手腕结构与通用六轴关节机器人相同,即一一个摆动轴、两个旋转轴,三个轴线相交于一点 ,且两个相邻关节的轴线垂直。
球型手腕涂装机器人的手腕结构与通用六轴关节机器人相同,即一一个摆动轴、两个旋转轴,三个轴线相交于一点 ,且两个相邻关节的轴线垂直。
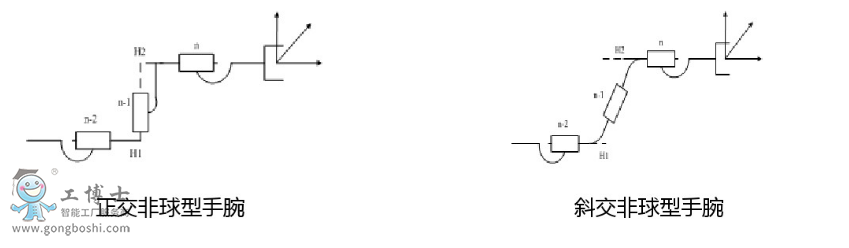
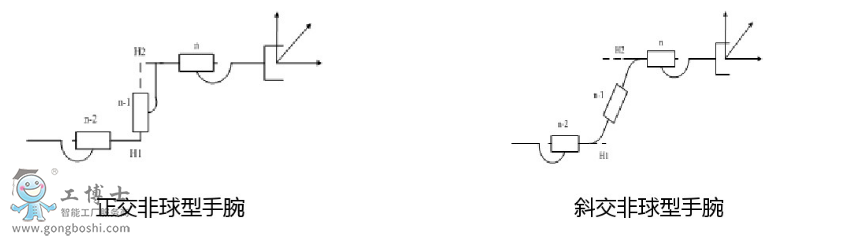
2.非球型手腕涂装机器人:
非球型手腕和球型手腕的不同是手腕的三个关节轴线不是相交于一点,二是相交于两点,根据相邻轴线的位置关系非球型手腕可分为正交非球型手腕(两相邻关节轴线相互垂直)和斜交非球型手腕(两相邻关节轴线成非90°的夹角)。
非球型手腕和球型手腕的不同是手腕的三个关节轴线不是相交于一点,二是相交于两点,根据相邻轴线的位置关系非球型手腕可分为正交非球型手腕(两相邻关节轴线相互垂直)和斜交非球型手腕(两相邻关节轴线成非90°的夹角)。
更多资讯:川崎涂装机器人
